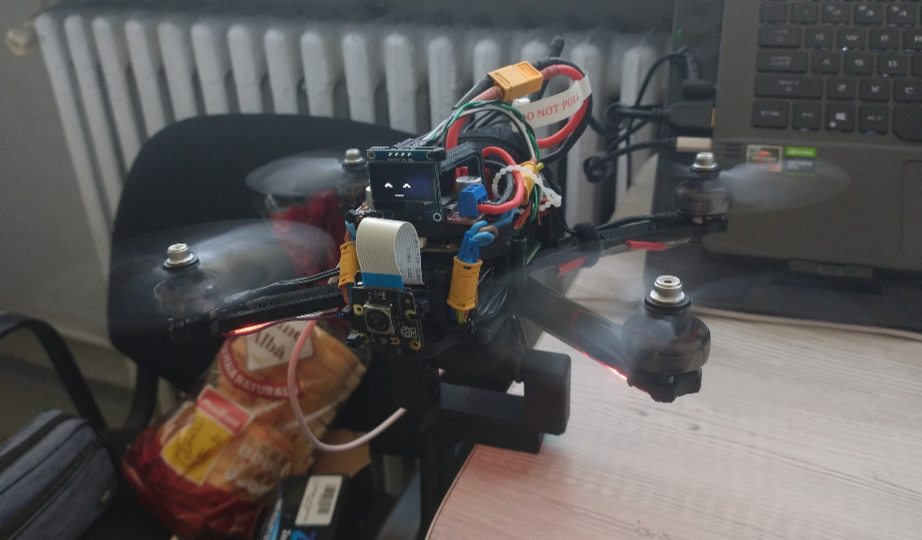
This code runs on a Raspberry Pi for an FPV drone, handling flight control and stabilization. While the hardware for video streaming is present, it currently interfaces with sensors and motors for real-time control only.
C
ASM
C++
SHELL